
Introduction
The Controller Area Network (CAN) bus is a robust and efficient communication protocol that has become the standard in automotive and industrial applications. One of the key features that contribute to the CAN bus's reliability is a technique known as bit stuffing. This post will delve into the intricacies of bit stuffing, its purpose, and how it enhances the CAN bus system's performance.
Understanding Bit Stuffing
Bit stuffing is a form of data communication used in various protocols, including the CAN bus, to prevent false synchronization. It involves adding non-information bits into the data stream to break up patterns that could be mistaken for frame boundaries.
In the CAN bus protocol, bit stuffing occurs after five consecutive bits of the same value. If these bits are all 1s or 0s, an additional bit of the opposite value is inserted into the data stream. This additional bit, known as the 'stuff bit,' is inserted regardless of the data's content.
The Purpose of Bit Stuffing
The primary purpose of bit stuffing is to maintain synchronization between different nodes on the CAN bus. The CAN bus protocol relies on edge transitions (the change from 0 to 1 or vice versa) to synchronize the internal clocks of different nodes. If there are too many consecutive bits of the same value, the lack of edge transitions could lead to a loss of synchronization.
By adding a stuff bit after every five consecutive bits of the same value, bit stuffing ensures that there are enough edge transitions for the nodes to stay synchronized. This process enhances the reliability of the CAN bus system, allowing it to function correctly even in noisy environments.
Bit Stuffing in Action
Let's consider a practical example. Suppose we have a data frame with the following bit sequence: 111110. After the fifth consecutive '1', a '0' is inserted, resulting in the sequence: 1111100. This stuffed bit allows for an edge transition, helping maintain synchronization.
The CAN bus protocol also includes a mechanism for removing stuff bits during the de-stuffing process at the receiver end. This ensures that the stuff bits do not interfere with the actual data being transmitted.
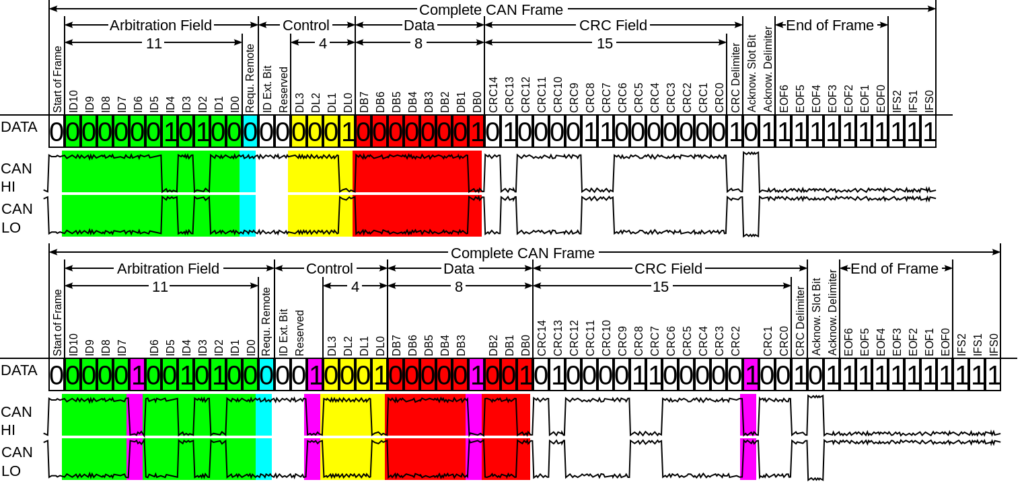
Figure 1. CAN frame before and after the addition of stuff bits (in purple). An incorrect CRC is used for bit stuffing illustration purposes. (Image from Wikipedia CC BY-SA 3.0)
Conclusion
Bit stuffing is a crucial aspect of the CAN bus protocol, ensuring reliable and efficient communication between different nodes. By maintaining synchronization and preventing false frame detection, bit stuffing allows the CAN bus system to operate effectively in various applications, from vehicles to industrial automation systems.
Understanding the underlying mechanisms like bit stuffing that drive the CAN bus protocol can help engineers and developers troubleshoot issues, optimize system performance, and develop more robust applications.
Stay tuned for more insights into the fascinating world of CAN bus systems and the technologies that make them tick.